2D Linear Elasticity
Continuous linear elasticity describes the small deformations of an elastic body under applied loads. Let \(\Omega \subset \mathbb{R}^d\) be the reference configuration of the body, and let \(u : \Omega \to \mathbb{R}^d\) denote the displacement field. Under the assumptions of small strains and linear material response, the infinitesimal strain tensor is defined as
The corresponding Cauchy stress tensor for isotropic material is
where \(\lambda\) and \(\mu\) are the Lamé parameters, \(\mathrm{tr}(\cdot)\) denotes the trace operator, and \(I\) is the identity tensor.
The strong form of the linear elasticity problem consists in finding \(u\) such that
together with appropriate Dirichlet (prescribed displacement) and Neumann (prescribed traction) boundary conditions.
We will also consider the variational (weak) formulation: in the case of Dirichlet BC, find \(u\) in a suitable function space such that
where \(v\) denotes admissible test functions. This formulation can be interpreted as the first-order optimality condition of the total elastic energy and forms the basis of most numerical methods.
In this notebook, we will solve the linear elasticity problem using Discrete Exterior Calculus (DEC). By expressing the governing equations and the variational formulation in terms of discrete differential forms and Hodge star operators, DEC provides a geometrically consistent and structure-preserving framework for discretizing linear elasticity on simplicial complexes.
Imports and config setup
[1]:
import numpy as np
from dctkit.mesh import util
from dctkit.math.opt import optctrl
from dctkit.physics.elasticity import LinearElasticity
import dctkit as dt
import pygmsh
import jax.numpy as jnp
from functools import partial
import matplotlib.pyplot as plt
import dctkit.dec.cochain as C
from dctkit.dec.flat import *
[2]:
dt.config()
Simplicial complex, test problem and boundary conditions
First of all we create the 2-simplicial complex, which in this case is the discretization of the unit square \([0,1]^2\). We then consider the deformation scenario called uniaxial tension, in which both the stress and strain tensors are constants and are given by
where \(s = 2\mu\varepsilon + \lambda(\varepsilon + \ell)\), and \(\ell = - \lambda\varepsilon/(2\mu + \lambda)\).
[3]:
lc = 0.2
L = 1.
with pygmsh.geo.Geometry() as geom:
p = geom.add_polygon([[0., 0.], [L, 0.], [L, L], [0., L]], mesh_size=lc)
# create a default physical group for the boundary lines
geom.add_physical(p.lines, label="boundary")
geom.add_physical(p.lines[1], label="right")
geom.add_physical(p.lines[3], label="left")
mesh = geom.generate_mesh()
S = util.build_complex_from_mesh(mesh)
S.get_hodge_star()
S.get_flat_DPD_weights()
S.get_flat_DPP_weights()
[4]:
ref_node_coords = S.node_coords
bnd_edges_idx = S.boundary_simplices[S.dim-1]
left_bnd_nodes_idx = util.get_nodes_for_physical_group(mesh, 1, "left")
right_bnd_nodes_idx = util.get_nodes_for_physical_group(mesh, 1, "right")
left_bnd_edges_idx = util.get_edges_for_physical_group(S, mesh, "left")
right_bnd_edges_idx = util.get_edges_for_physical_group(S, mesh, "right")
bot_left_corn_idx = left_bnd_nodes_idx.index(0)
bottom_left_corner = left_bnd_nodes_idx[bot_left_corn_idx]
[5]:
mu_ = 1.
lambda_ = 10.
true_strain_xx = 0.5
true_strain_yy = -(lambda_/(2*mu_+lambda_))*true_strain_xx
true_curr_node_coords = S.node_coords.copy()
true_curr_node_coords[:, 0] *= 1 + true_strain_xx
true_curr_node_coords[:, 1] *= 1 + true_strain_yy
left_bnd_pos_components = [0]
right_bnd_pos_components = [0]
[6]:
left_bnd_nodes_pos = ref_node_coords[left_bnd_nodes_idx,
:][:, left_bnd_pos_components]
right_bnd_nodes_pos = true_curr_node_coords[right_bnd_nodes_idx,
:][:, right_bnd_pos_components]
bottom_left_corner_pos = ref_node_coords[bottom_left_corner, :]
[7]:
boundary_values = {"0": (left_bnd_nodes_idx + right_bnd_nodes_idx,
np.vstack((left_bnd_nodes_pos,
right_bnd_nodes_pos)).flatten()),
":": (bottom_left_corner, bottom_left_corner_pos)}
idx_free_edges = list(set(bnd_edges_idx) -
set(right_bnd_edges_idx) - set(left_bnd_edges_idx))
left_right_edges_idx = left_bnd_edges_idx+right_bnd_edges_idx
bnd_tractions_free_values = np.zeros((len(idx_free_edges), 2), dtype=dt.float_dtype)
bnd_tractions_left_right_values = np.zeros(
(len(left_right_edges_idx)), dtype=dt.float_dtype)
boundary_tractions = {':': (idx_free_edges, bnd_tractions_free_values),
'1': (left_right_edges_idx, bnd_tractions_left_right_values)}
gamma = 100000.
Utils
Now we define the scripts needed to compute the strain and stress tensors. They are computed as in the continous formulation starting from the deformation gradient, which is computed using the class method get_deformation_gradient
[8]:
def get_infinitesimal_strain(node_coords):
"""Compute the discrete strain tensor given the current node coordinates.
Args:
node_coords: current node coordinates.
Returns:
the discrete infinitesimal strain tensor.
"""
# compute the deformation gradient
num_faces = S.S[2].shape[0]
F = S.get_deformation_gradient(node_coords)
# epsilon = 1/2(F + F^T) - I
epsilon = 1/2 * (F + jnp.transpose(F, axes=(0, 2, 1))) - \
jnp.stack([jnp.identity(2)]*num_faces)
return epsilon
def get_stress(strain):
"""Compute the discrete stress tensor from strains using the consistutive
equation for isotropic linear elastic materials.
Args:
strain: discrete strain tensor.
Returns:
the discrete stress tensor.
"""
num_faces = S.S[2].shape[0]
tr_strain = jnp.trace(strain, axis1=1, axis2=2)
# get the stress via the consistutive equation for isotropic linear
# elastic materials
stress = 2.*mu_*strain + lambda_*tr_strain[:, None, None] * \
jnp.stack([jnp.identity(2)]*num_faces)
return stress
def get_penalty_displacement_bc(node_coords, boundary_values, gamma):
"""Set displacement boundary conditions as a quadratic penalty term.
Args:
node_coords: node coordinates of the current configuration.
boundary_values: a dictionary of tuples. Each key represent the type of
coordinate to manipulate (x,y, or both), while each tuple consists of
two np.arrays in which the first encodes the indices of boundary
values, while the last encodes the boundary values themselves.
gamma: penalty factor.
Return:
the penalty term.
"""
penalty = 0.
for key in boundary_values:
idx, values = boundary_values[key]
if key == ":":
penalty += jnp.sum((node_coords[idx, :] - values)**2)
else:
penalty += jnp.sum((node_coords[idx, int(key)] - values)**2)
return gamma*penalty
def set_boundary_tractions(forces,boundary_tractions):
"""Set the boundary tractions on primal edges.
Args:
forces: vector-valued primal 1-cochain containing forces acting on primal
edges.
boundary_tractions: a dictionary of tuples. Each key represent the type
of coordinate to manipulate (x,y, or both), while each tuple consists
of two jax arrays, in which the first encordes the indices where we
want to impose the boundary tractions, while the last encodes the
boundary traction values themselves.
Returns:
the updated force 1-cochain.
"""
for key in boundary_tractions:
idx, values = boundary_tractions[key]
if key == ":":
forces.coeffs = forces.coeffs.at[idx, :].set(values)
else:
forces.coeffs = forces.coeffs.at[idx, int(key)].set(values)
return forces
Variational Formulation
In the DEC framework, \(\boldsymbol{S}\) and \(\boldsymbol{E}\) are defined as dual tensor-valued 0-cochains, while \(u\) and \(f\) are primal vector-valued 0-cochains. The variational DEC-formulation can be written as
[9]:
def elasticity_energy(node_coords, f):
"""Compute the elasticity energy of isotropic linear elastic materials
in 2D with no body force using DEC framework.
Args:
node_coords: primal vector valued 0-cochain of node coordinates
of the current configuration.
f: primal vector-valued 0-cochain of sources.
Returns:
the energy.
"""
strain = get_infinitesimal_strain(node_coords=node_coords.coeffs)
stress = get_stress(strain=strain)
strain_cochain = C.CochainD0(S, strain)
stress_cochain = C.CochainD0(S, stress)
ref_node_coords = C.CochainP0(S, S.node_coords)
displacement = C.sub(node_coords, ref_node_coords)
elastic_energy = 0.5 * \
C.inner(strain_cochain, stress_cochain) - \
C.inner(displacement, f)
return elastic_energy
[10]:
def obj_linear_elasticity_energy(node_coords, f, gamma, boundary_values):
"""
Objective function of the optimization problem associated to linear elasticity
(energy formulation) with Dirichlet boundary conditions on a portion of the
boundary.
Args:
node_coords: 1-dimensional array obtained after flattening the matrix with
node coordinates arranged row-wise.
f: matrix of external sources (constant term of the system).
gamma: penalty factor.
boundary_values: a dictionary of tuples. Each key represent the type
of coordinate to manipulate (x,y, or both), while each tuple consists
of two np.arrays in which the first encodes the indices of boundary
values, while the last encodes the boundary values themselves.
Returns:
the value of the objective function at node_coords.
"""
node_coords_reshaped = node_coords.reshape(S.node_coords.shape)
node_coords_coch = C.CochainP0(complex=S, coeffs=node_coords_reshaped)
f_coch = C.CochainP0(complex=S, coeffs=f)
elastic_energy = elasticity_energy(node_coords_coch, f_coch)
penalty = get_penalty_displacement_bc(node_coords=node_coords_reshaped,
boundary_values=boundary_values,
gamma=gamma)
energy = elastic_energy + penalty
return energy
[11]:
num_faces = S.S[2].shape[0]
embedded_dim = S.space_dim
f = np.zeros((S.num_nodes, embedded_dim))
obj = obj_linear_elasticity_energy
obj_args = {'f': f, 'gamma': gamma, 'boundary_values': boundary_values}
x0 = S.node_coords.flatten()
[12]:
prb = optctrl.OptimizationProblem(dim=len(x0), state_dim=len(x0), objfun=obj)
prb.set_obj_args(obj_args)
sol = prb.solve(x0=x0, ftol_abs=1e-12, ftol_rel=1e-12, maxeval=100000)
[13]:
curr_node_coords = sol.reshape(S.node_coords.shape)
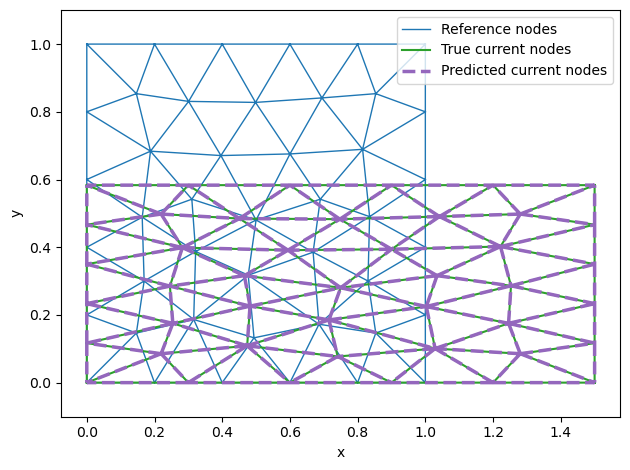
[14]:
# Reference configuration
plt.triplot(
ref_node_coords[:, 0],
ref_node_coords[:, 1],
triangles=S.S[2],
linewidth=1.0,
label="Reference nodes"
)
# True current configuration
plt.triplot(
true_curr_node_coords[:, 0],
true_curr_node_coords[:, 1],
triangles=S.S[2],
linewidth=1.5,
label="True current nodes"
)
# Predicted current configuration (highlighted)
plt.triplot(
curr_node_coords[:, 0],
curr_node_coords[:, 1],
triangles=S.S[2],
linewidth=2.5,
label="Predicted current nodes",
linestyle="--",
)
# Axis labels and formatting
plt.xlabel("x")
plt.ylabel("y")
plt.axis("equal")
plt.legend()
plt.tight_layout()
plt.show()
Non-variational formulation
In this case, the strong form equation assumes the following form in the DEC framework:
where \(\flat\) is the DPD flat operator firstly introduced in Hirani 2003.
[15]:
def force_balance_residual_primal(node_coords, f, boundary_tractions):
"""Compute the residual of the discrete balance equation in the case
of isotropic linear elastic materials in 2D using DEC framework.
Args:
node_coords: primal vector valued 0-cochain of node coordinates of the
current configuration.
f: primal vector-valued 2-cochain of sources.
boundary_tractions: a dictionary of tuples. Each key represent the type
of coordinate to manipulate (x,y, or both), while each tuple consists
of two jax arrays, in which the first encordes the indices where we
want to impose the boundary tractions, while the last encodes the
boundary traction values themselves.
Returns:
the residual vector-valued cochain.
"""
strain = get_infinitesimal_strain(node_coords=node_coords.coeffs)
stress = get_stress(strain=strain)
stress_tensor = C.CochainD0T(complex=S, coeffs=stress)
stress_integrated = flat_DPD(stress_tensor)
forces = C.star(stress_integrated)
# set tractions on given sub-portions of the boundary
forces_bnd_update = set_boundary_tractions(forces, boundary_tractions)
residual = C.add(C.coboundary(forces_bnd_update), f)
return residual
def obj_linear_elasticity_primal(node_coords, f, gamma, boundary_values, boundary_tractions):
"""
Objective function of the optimization problem associated to linear
elasticity balance equation with Dirichlet boundary conditions on a portion
of the boundary.
Args:
node_coords: 1-dimensional array obtained after flattening the matrix with
node coordinates arranged row-wise.
f: matrix of external sources (constant term of the system).
gamma: penalty factor.
boundary_values: a dictionary of tuples. Each key represent the type of
coordinate to manipulate (x,y, or both), while each tuple consists of
two np.arrays in which the first encodes the indices of boundary
values, while the last encodes the boundary values themselves.
boundary_tractions: a dictionary of tuples. Each key represent the type
of coordinate to manipulate (x,y, or both), while each tuple consists
of two jax arrays, in which the first encordes the indices where we want
to impose the boundary tractions, while the last encodes the boundary
traction values themselves. It is None when we perform the force balance
on dual cells.
Returns:
the value of the objective function at node_coords.
"""
node_coords_reshaped = node_coords.reshape(S.node_coords.shape)
node_coords_coch = C.CochainP0(complex=S, coeffs=node_coords_reshaped)
f_coch = C.CochainP2(complex=S, coeffs=f)
residual = force_balance_residual_primal(
node_coords_coch, f_coch, boundary_tractions).coeffs
penalty = get_penalty_displacement_bc(node_coords=node_coords_reshaped,
boundary_values=boundary_values,
gamma=gamma)
energy = jnp.sum(residual**2) + penalty
return energy
[16]:
num_faces = S.S[2].shape[0]
embedded_dim = S.space_dim
f = np.zeros((num_faces, (embedded_dim-1)))
obj = obj_linear_elasticity_primal
obj_args = {'f': f,
'gamma': gamma,
'boundary_values': boundary_values,
'boundary_tractions': boundary_tractions}
x0 = S.node_coords.flatten()
[17]:
prb = optctrl.OptimizationProblem(dim=len(x0), state_dim=len(x0), objfun=obj)
prb.set_obj_args(obj_args)
sol = prb.solve(x0=x0, ftol_abs=1e-12, ftol_rel=1e-12, maxeval=100000)
curr_node_coords = sol.reshape(S.node_coords.shape)
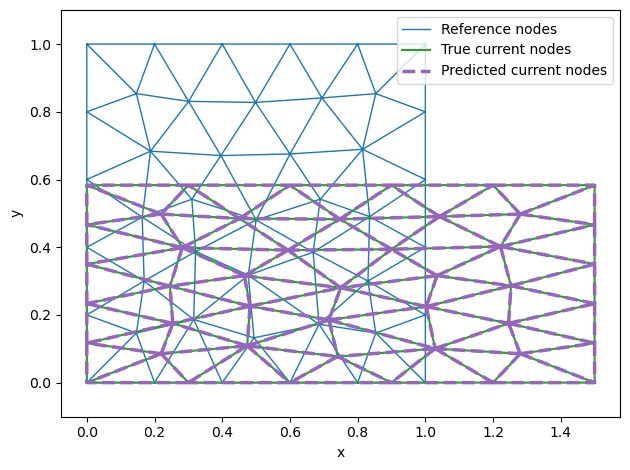
[18]:
# Reference configuration
plt.triplot(
ref_node_coords[:, 0],
ref_node_coords[:, 1],
triangles=S.S[2],
linewidth=1.0,
label="Reference nodes"
)
# True current configuration
plt.triplot(
true_curr_node_coords[:, 0],
true_curr_node_coords[:, 1],
triangles=S.S[2],
linewidth=1.5,
label="True current nodes"
)
# Predicted current configuration (highlighted)
plt.triplot(
curr_node_coords[:, 0],
curr_node_coords[:, 1],
triangles=S.S[2],
linewidth=2.5,
label="Predicted current nodes",
linestyle="--",
)
# Axis labels and formatting
plt.xlabel("x")
plt.ylabel("y")
plt.axis("equal")
plt.legend()
plt.tight_layout()
plt.show()